现代深度卷积神经网络架构的代码实现
小白劝退预告
- 仅简单介绍思路,没有用作教程的打算,如果读者没有深度学习基础、计算机视觉基础、Pytorch基础 —— 会很不友好的(
前置准备
我们先准备好对应的第三方模块包和使用函数
1 | import torch |
我们先写好一个展示神经网络结构并输出张量形状的函数
showModel 通过递归调用,将所有 Sequential 类展开,并以此输出各层的张量大小
showNet 通过输入模型,并指定张量的大小,实现了测试函数的封装
1 | def showModel(model, inputs): |
我们先创建一个神经网络,并测试上述函数的作用
我们发现这个函数实现了我们需要的功能
1 | showNet( |
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
MaxPool2d output shape : torch.Size([1, 96, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
MaxPool2d output shape : torch.Size([1, 256, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 256, 12, 12])
ReLU output shape : torch.Size([1, 256, 12, 12])
MaxPool2d output shape : torch.Size([1, 256, 5, 5])
Flatten output shape : torch.Size([1, 6400])
Linear output shape : torch.Size([1, 4096])
ReLU output shape : torch.Size([1, 4096])
Dropout1d output shape : torch.Size([1, 4096])
Linear output shape : torch.Size([1, 4096])
ReLU output shape : torch.Size([1, 4096])
Dropout1d output shape : torch.Size([1, 4096])
Linear output shape : torch.Size([1, 10])
Softmax output shape : torch.Size([1, 10])
tensor([[0.1006, 0.0992, 0.1000, 0.0991, 0.1017, 0.0995, 0.1013, 0.0994, 0.1002, 0.0991]], grad_fn=)
LeNet
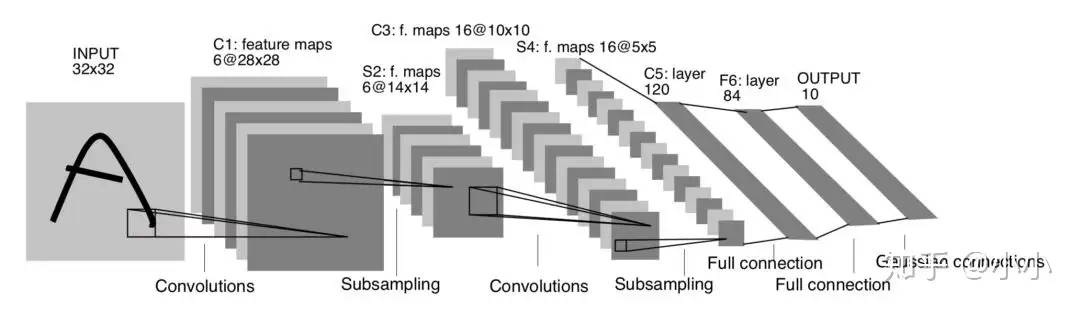
Lenet 是一系列网络的合称,包括 Lenet1 - Lenet5,由 Yann LeCun 等人在 1990 年《Handwritten Digit Recognition with a Back-Propagation Network》中提出,是卷积神经网络的 HelloWorld
Lenet是一个 7 层的神经网络,包含 3 个卷积层,2 个池化层,1 个全连接层。其中所有卷积层的所有卷积核都为 5x5,步长 strid=1,池化方法都为全局 pooling,激活函数为 Sigmoid,网络结构如下:
1 | # input_size (1, 1, 32, 32) |
Conv2d output shape : torch.Size([1, 6, 28, 28])
MaxPool2d output shape : torch.Size([1, 6, 14, 14])
Conv2d output shape : torch.Size([1, 16, 10, 10])
MaxPool2d output shape : torch.Size([1, 16, 5, 5])
Flatten output shape : torch.Size([1, 400])
Linear output shape : torch.Size([1, 120])
ReLU output shape : torch.Size([1, 120])
Linear output shape : torch.Size([1, 84])
ReLU output shape : torch.Size([1, 84])
Linear output shape : torch.Size([1, 10])
Softmax output shape : torch.Size([1, 10])
tensor([[0.1064, 0.0967, 0.1137, 0.1009, 0.0889, 0.1013, 0.0960, 0.0934, 0.0930, 0.1098]], grad_fn=)
AlexNet
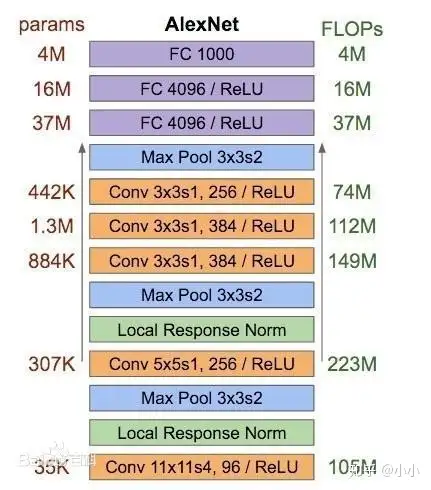
2012 年, AlexNet 横空出世。这个模型的名字来源于论⽂第一作者的姓名 Alex Krizhevsky。AlexNet 使⽤了 8 层卷积神经⽹络,并以很⼤的优势赢得了 ImageNet 2012 图像识别挑战赛冠军
Alexnet模型由5个卷积层和3个池化Pooling 层 ,其中还有3个全连接层构成。AlexNet 跟 LeNet 结构类似,但使⽤了更多的卷积层和更⼤的参数空间来拟合⼤规模数据集 ImageNet。它是浅层神经⽹络和深度神经⽹络的分界线
特点:
- 在每个卷机后面添加了Relu激活函数,解决了Sigmoid的梯度消失问题,使收敛更快。
- 使用随机丢弃技术(dropout)选择性地忽略训练中的单个神经元,避免模型的过拟合(也使用数据增强防止过拟合)
- 添加了归一化LRN(Local Response Normalization,局部响应归一化)层,使准确率更高。
- 重叠最大池化(overlapping max pooling),即池化范围 z 与步长 s 存在关系 z>s 避免平均池化(average pooling)的平均效应
1 | # input_size (1, 1, 224, 224) |
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
BatchNorm2d output shape : torch.Size([1, 96, 54, 54])
MaxPool2d output shape : torch.Size([1, 96, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
BatchNorm2d output shape : torch.Size([1, 256, 26, 26])
MaxPool2d output shape : torch.Size([1, 256, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 256, 12, 12])
ReLU output shape : torch.Size([1, 256, 12, 12])
MaxPool2d output shape : torch.Size([1, 256, 5, 5])
Flatten output shape : torch.Size([1, 6400])
Linear output shape : torch.Size([1, 4096])
ReLU output shape : torch.Size([1, 4096])
Dropout1d output shape : torch.Size([1, 4096])
Linear output shape : torch.Size([1, 4096])
ReLU output shape : torch.Size([1, 4096])
Dropout1d output shape : torch.Size([1, 4096])
Linear output shape : torch.Size([1, 10])
Softmax output shape : torch.Size([1, 10])
tensor([[0.1014, 0.0974, 0.0996, 0.1008, 0.1008, 0.1011, 0.0983, 0.1004, 0.1017, 0.0985]], grad_fn=)
VGG
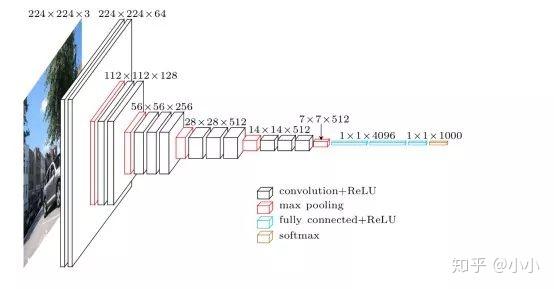
VGGNet 是由牛津大学视觉几何小组(Visual Geometry Group, VGG)提出的一种深层卷积网络结构,他们以 7.32% 的错误率赢得了 2014 年 ILSVRC 分类任务的亚军(冠军由 GoogLeNet 以 6.65% 的错误率夺得)和 25.32% 的错误率夺得定位任务(Localization)的第一名(GoogLeNet 错误率为 26.44%)。VGG可以看成是加深版本的AlexNet. 都是conv layer + FC layer
为了解决初始化(权重初始化)等问题,VGG采用的是一种Pre-training的方式,先训练浅层的的简单网络 VGG11,再复用 VGG11 的权重来初始化 VGG13,如此反复训练并初始化 VGG19,能够使训练时收敛的速度更快。整个网络都使用卷积核尺寸为 3×3 和最大池化尺寸 2×2
比较常用的VGG-16的16指的是conv+fc的总层数是16,是不包括max pool的层数!
3x3卷积的优点:
多个3×3的卷积层比一个大尺寸的filter有更少的参数,假设卷基层的输入和输出的特征图大小相同为C,那么三个3×3的卷积层参数个数3×(3×3×C×C)=27CC;一个7×7的卷积层参数为49CC;所以可以把三个3×3的filter看成是一个7×7filter的分解(中间层有非线性的分解)
1 | def vggBlock(conv_num, in_channels, out_channels): |
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
MaxPool2d output shape : torch.Size([1, 96, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
MaxPool2d output shape : torch.Size([1, 256, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
MaxPool2d output shape : torch.Size([1, 384, 5, 5])
Dropout output shape : torch.Size([1, 384, 5, 5])
Conv2d output shape : torch.Size([1, 10, 5, 5])
ReLU output shape : torch.Size([1, 10, 5, 5])
Conv2d output shape : torch.Size([1, 10, 5, 5])
ReLU output shape : torch.Size([1, 10, 5, 5])
Conv2d output shape : torch.Size([1, 10, 5, 5])
ReLU output shape : torch.Size([1, 10, 5, 5])
AdaptiveAvgPool2d output shape : torch.Size([1, 10, 1, 1])
Flatten output shape : torch.Size([1, 10])
Softmax output shape : torch.Size([1, 10])
tensor([[0.0893, 0.1014, 0.0876, 0.1105, 0.0876, 0.1088, 0.1234, 0.1086, 0.0896, 0.0930]], grad_fn=)
NiN
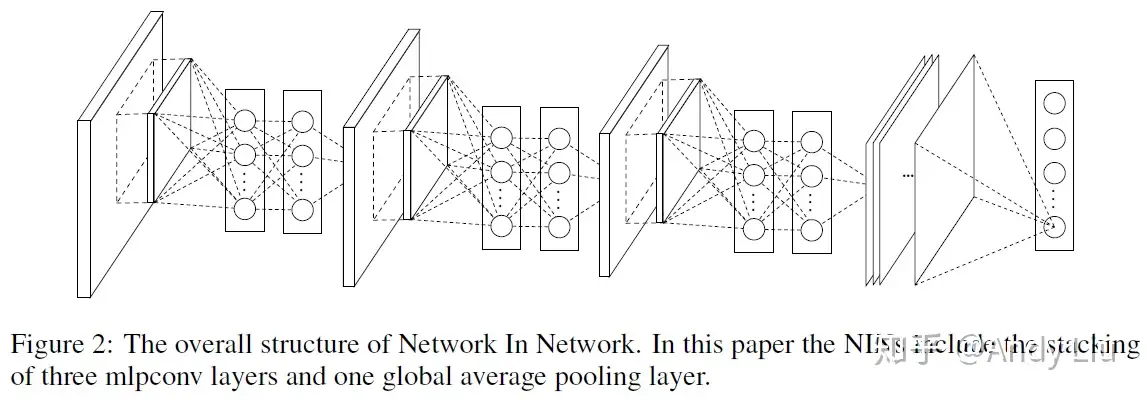
出自新加坡国立大学2014年的论文 Network In Network
该设计后来为 ResNet 和 Inception 等网络模型所借鉴
Improvement
先前CNN中 简单的 线性卷积层 [蓝框部分]被替换为了 多层感知机(MLP,多层全连接层和非线性函数的组合) [绿框部分]:
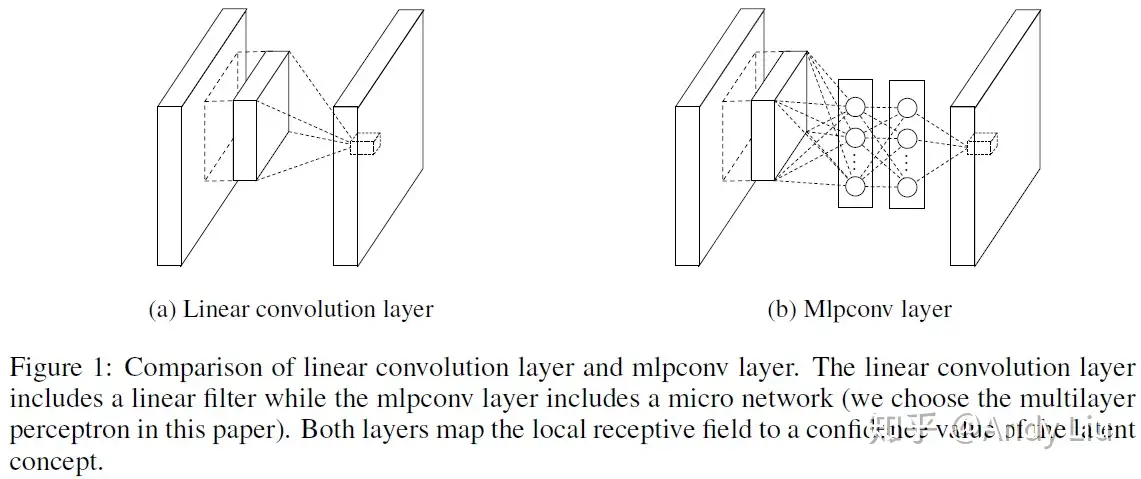
优点是:
- 提供了网络层间映射的一种新可能
- 增加了网络卷积层的非线性能力
先前CNN中的 全连接层 被替换为了 全局池化层 (global average pooling):
假设分类任务共有C个类别
先前CNN中最后一层为特征图层数共计N的全连接层,要映射到C个类别上;
改为全局池化层后,最后一层为特征图层数共计C的全局池化层,恰好对应分类任务的C个类别,这样一来,就会有更好的可解释性了
1 | def ninBlock(in_channels, out_channels, kernel_size, stride, padding): |
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
Conv2d output shape : torch.Size([1, 96, 54, 54])
ReLU output shape : torch.Size([1, 96, 54, 54])
MaxPool2d output shape : torch.Size([1, 96, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
Conv2d output shape : torch.Size([1, 256, 26, 26])
ReLU output shape : torch.Size([1, 256, 26, 26])
MaxPool2d output shape : torch.Size([1, 256, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
Conv2d output shape : torch.Size([1, 384, 12, 12])
ReLU output shape : torch.Size([1, 384, 12, 12])
MaxPool2d output shape : torch.Size([1, 384, 5, 5])
Dropout output shape : torch.Size([1, 384, 5, 5])
Conv2d output shape : torch.Size([1, 10, 5, 5])
ReLU output shape : torch.Size([1, 10, 5, 5])
Conv2d output shape : torch.Size([1, 10, 5, 5])
ReLU output shape : torch.Size([1, 10, 5, 5])
Conv2d output shape : torch.Size([1, 10, 5, 5])
ReLU output shape : torch.Size([1, 10, 5, 5])
AdaptiveAvgPool2d output shape : torch.Size([1, 10, 1, 1])
Flatten output shape : torch.Size([1, 10])
Softmax output shape : torch.Size([1, 10])
tensor([[0.0893, 0.1014, 0.0876, 0.1105, 0.0876, 0.1088, 0.1234, 0.1086, 0.0896, 0.0930]], grad_fn=)
GoogLeNet
GoogLeNet是google推出的基于Inception模块的深度神经网络模型,在2014年的ImageNet竞赛中夺得了冠军,在随后的两年中一直在改进,形成了Inception V2、Inception V3、Inception V4等版本。我们会用一系列文章,分别对这些模型做介绍。本篇文章先介绍最早版本的GoogLeNet
1. 为什么要提出Inception
一般来说,提升网络性能最直接的办法就是增加网络深度和宽度,但一味地增加,会带来诸多问题:
- 参数太多,如果训练数据集有限,很容易产生过拟合;
- 网络越大、参数越多,计算复杂度越大,难以应用;
- 网络越深,容易出现梯度弥散问题(梯度越往后穿越容易消失),难以优化模型。
我们希望在增加网络深度和宽度的同时减少参数,为了减少参数,自然就想到将全连接变成稀疏连接。但是在实现上,全连接变成稀疏连接后实际计算量并不会有质的提升,因为大部分硬件是针对密集矩阵计算优化的,稀疏矩阵虽然数据量少,但是计算所消耗的时间却很难减少。在这种需求和形势下,Google研究人员提出了Inception的方法。
2. 什么是Inception
Inception就是把多个卷积或池化操作,放在一起组装成一个网络模块,设计神经网络时以模块为单位去组装整个网络结构。模块如下图所示
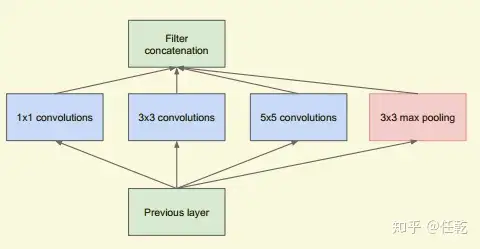
在未使用这种方式的网络里,我们一层往往只使用一种操作,比如卷积或者池化,而且卷积操作的卷积核尺寸也是固定大小的。但是,在实际情况下,在不同尺度的图片里,需要不同大小的卷积核,这样才能使性能最好,或者或,对于同一张图片,不同尺寸的卷积核的表现效果是不一样的,因为他们的感受野不同。所以,我们希望让网络自己去选择,Inception便能够满足这样的需求,一个Inception模块中并列提供多种卷积核的操作,网络在训练的过程中通过调节参数自己去选择使用,同时,由于网络中都需要池化操作,所以此处也把池化层并列加入网络中。
3. 实际中需要什么样的Inception
我们在上面提供了一种Inception的结构,但是这个结构存在很多问题,是不能够直接使用的。首要问题就是参数太多,导致特征图厚度太大。为了解决这个问题,作者在其中加入了1X1的卷积核,改进后的Inception结构如下图
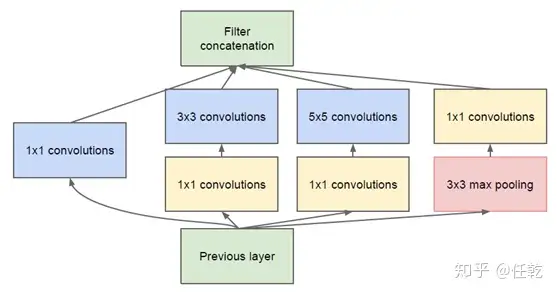
这样做有两个好处,首先是大大减少了参数量,其次,增加的1X1卷积后面也会跟着有非线性激励,这样同时也能够提升网络的表达能力
- GoogLeNet采用了模块化的结构(Inception结构),方便增添和修改;
- 网络最后采用了average pooling(平均池化)来代替全连接层,该想法来自NIN(Network in Network),事实证明这样可以将准确率提高0.6%。
- 虽然移除了全连接,但是网络中依然使用了Dropout ;
1 | class Inception(nn.Module): |
Conv2d output shape : torch.Size([1, 64, 112, 112])
ReLU output shape : torch.Size([1, 64, 112, 112])
MaxPool2d output shape : torch.Size([1, 64, 56, 56])
Conv2d output shape : torch.Size([1, 64, 56, 56])
ReLU output shape : torch.Size([1, 64, 56, 56])
Conv2d output shape : torch.Size([1, 192, 56, 56])
ReLU output shape : torch.Size([1, 192, 56, 56])
MaxPool2d output shape : torch.Size([1, 192, 28, 28])
Inception output shape : torch.Size([1, 256, 28, 28])
Inception output shape : torch.Size([1, 480, 28, 28])
MaxPool2d output shape : torch.Size([1, 480, 14, 14])
Inception output shape : torch.Size([1, 512, 14, 14])
Inception output shape : torch.Size([1, 512, 14, 14])
Inception output shape : torch.Size([1, 512, 14, 14])
Inception output shape : torch.Size([1, 528, 14, 14])
Inception output shape : torch.Size([1, 832, 14, 14])
MaxPool2d output shape : torch.Size([1, 832, 7, 7])
Inception output shape : torch.Size([1, 832, 7, 7])
Inception output shape : torch.Size([1, 1024, 7, 7])
AdaptiveAvgPool2d output shape : torch.Size([1, 1024, 1, 1])
Flatten output shape : torch.Size([1, 1024])
Linear output shape : torch.Size([1, 10])
Softmax output shape : torch.Size([1, 10])
tensor([[0.1017, 0.0981, 0.0969, 0.1013, 0.1027, 0.1005, 0.0995, 0.1007, 0.0990, 0.0995]], grad_fn=)
DenseNet
相比ResNet,DenseNet提出了一个更激进的密集连接机制:即互相连接所有的层,具体来说就是每个层都会接受其前面所有层作为其额外的输入。图1为ResNet网络的连接机制,作为对比,图2为DenseNet的密集连接机制。可以看到,ResNet是每个层与前面的某层(一般是2~3层)短路连接在一起,连接方式是通过元素级相加。而在DenseNet中,每个层都会与前面所有层在channel维度上连接(concat)在一起(这里各个层的特征图大小是相同的,后面会有说明),并作为下一层的输入。对于一个L层的网络,DenseNet共包含L(L + 1) / 2个连接,相比ResNet,这是一种密集连接。而且DenseNet是直接concat来自不同层的特征图,这可以实现特征重用,提升效率,这一特点是DenseNet与ResNet最主要的区别
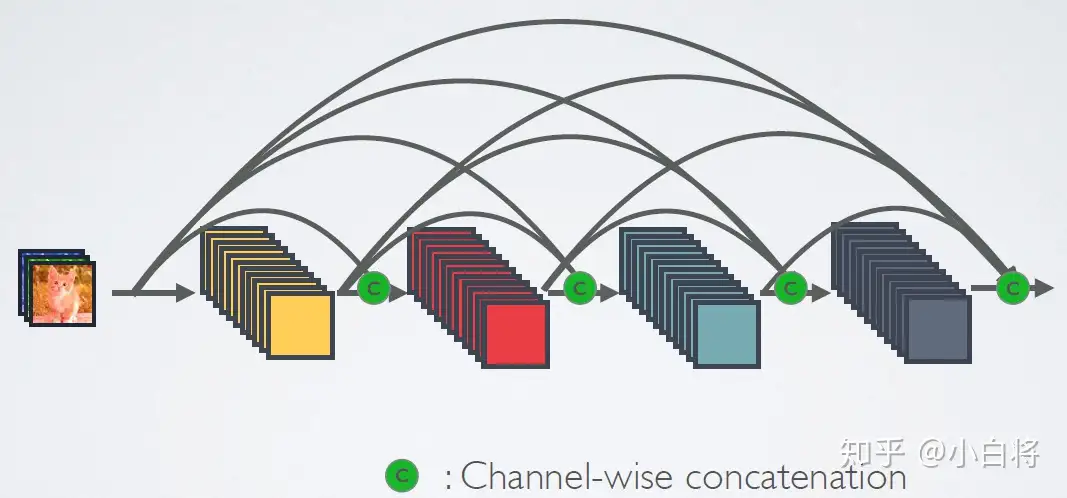
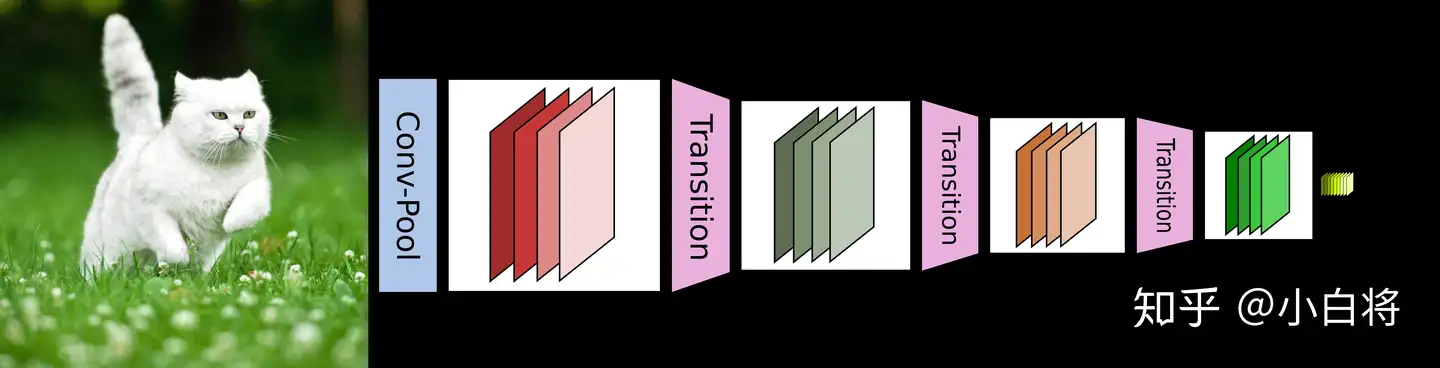
CNN网络一般要经过Pooling或者stride>1的Conv来降低特征图的大小,而DenseNet的密集连接方式需要特征图大小保持一致。为了解决这个问题,DenseNet网络中使用DenseBlock+Transition的结构,其中DenseBlock是包含很多层的模块,每个层的特征图大小相同,层与层之间采用密集连接方式。而Transition模块是连接两个相邻的DenseBlock,并且通过Pooling使特征图大小降低。图4给出了DenseNet的网路结构,它共包含4个DenseBlock,各个DenseBlock之间通过Transition连接在一起
DenseNet的优势主要体现在以下几个方面:
- 由于密集连接方式,DenseNet提升了梯度的反向传播,使得网络更容易训练。由于每层可以直达最后的误差信号,实现了隐式的“deep supervision”;
- 参数更小且计算更高效,这有点违反直觉,由于DenseNet是通过concat特征来实现短路连接,实现了特征重用,并且采用较小的growth rate,每个层所独有的特征图是比较小的;
- 由于特征复用,最后的分类器使用了低级特征。
1 | def conv_block(input_channels, num_channels): |
Conv2d output shape : torch.Size([1, 64, 112, 112])
BatchNorm2d output shape : torch.Size([1, 64, 112, 112])
ReLU output shape : torch.Size([1, 64, 112, 112])
MaxPool2d output shape : torch.Size([1, 64, 56, 56])
DenseBlock output shape : torch.Size([1, 192, 56, 56])
BatchNorm2d output shape : torch.Size([1, 192, 56, 56])
ReLU output shape : torch.Size([1, 192, 56, 56])
Conv2d output shape : torch.Size([1, 96, 56, 56])
AvgPool2d output shape : torch.Size([1, 96, 28, 28])
DenseBlock output shape : torch.Size([1, 224, 28, 28])
BatchNorm2d output shape : torch.Size([1, 224, 28, 28])
ReLU output shape : torch.Size([1, 224, 28, 28])
Conv2d output shape : torch.Size([1, 112, 28, 28])
AvgPool2d output shape : torch.Size([1, 112, 14, 14])
DenseBlock output shape : torch.Size([1, 240, 14, 14])
BatchNorm2d output shape : torch.Size([1, 240, 14, 14])
ReLU output shape : torch.Size([1, 240, 14, 14])
Conv2d output shape : torch.Size([1, 120, 14, 14])
AvgPool2d output shape : torch.Size([1, 120, 7, 7])
DenseBlock output shape : torch.Size([1, 248, 7, 7])
BatchNorm2d output shape : torch.Size([1, 248, 7, 7])
ReLU output shape : torch.Size([1, 248, 7, 7])
AdaptiveAvgPool2d output shape : torch.Size([1, 248, 1, 1])
Flatten output shape : torch.Size([1, 248])
Linear output shape : torch.Size([1, 10])
Softmax output shape : torch.Size([1, 10])
tensor([[0.1015, 0.0667, 0.0933, 0.1145, 0.1166, 0.0881, 0.0913, 0.1304, 0.0918, 0.1058]], grad_fn=)
总结
LeNet
- 卷积神经网络概念的提出
- 分为卷积层和全连接层
- 没用到 Dropout 和 BatchNormal 等正则化技术
AlexNet
- 深度卷积神经网络的第一次尝试
- 分为卷积层和全连接层
- 卷积层使用了暂退法,Dropout
- 全连接层使用了批量正则化 BatchNormal
VGG
- 可以看作是模块化了的 AlexNet
- 网络模块化,可便捷加深或预训练
- 不断地使用卷积 + 池化,最后全连接
- 可使用相关正则化技术
NiN
- 先不断地卷积 + 多层感知机连接(即一维卷积核)
- 然后不断地池化,最后池化至 (1, 1)
- 最终每个通道的值对应一个分类的预测值
GoogleNet
- 可模块化
- 大大减少了网络参数,优化了显存消耗
- 每层可实现多种操作,扩大了感受野
- 不使用全连接,可 Dropout
ResNet
- 每层采用恒等变换,扩大了网络的可变性
- 为每层网络的训练提供快捷通道,极大地消除了深层网络的训练问题
- 极大地启发了往后深度网络的架构思路
DenseNet
- 每个层都会接受其前面所有层作为其额外的输入
- 实现特征复用,简单特征居多
- 特征计算小,网络训练高效
- 不断地扩大特征并池化,使网络在一边增长的同时一边缩减
 wechat
wechat